throttle and electric brake wire long is 150cm,hole diameter is 22mm



36V-48V 350W controller can work with hall sensor/hall sensorless
Rated Voltage: 36V/48V
Low Voltage : 31V/42V±0.5V
Rated Power: 350W
Limit Current: 17A
1.pointer meter line
2. motor line
3.3-speed line
4.Anti-theft alarm line
5.self-learning line
6.hall line
7.throttle line
8.low brake
9.Anti-theft power line
10.Cruise speed line
11.battery(2 red wires battery +,black battery -)
12.high brake
how to connect?
1.connect the motor line (color to color)
2. connect the battery line(2 red wires :battery + , black:battery-)
3. connect the controller throttle line(color to color)
4. connect the hall line(if motor without hall line, don’t need connect)
5.docking the two self-learning lines, the wheel will forward or reverse.
(1.if wheel forward ,Separate the self-learning line.
2.if wheel reverse, Separate the self-learning line. Docking the self-learning line again,if wheel forward ,Separate the self-learning line.)
6.other functions can be connected as needed.



36V-48V 500W controller can work with hall sensor/hall sensorless
Rated Voltage: 36V-48V
Low Voltage : 31V/42V±0.5V
Rated Power: 500W
Limit Current: 30A
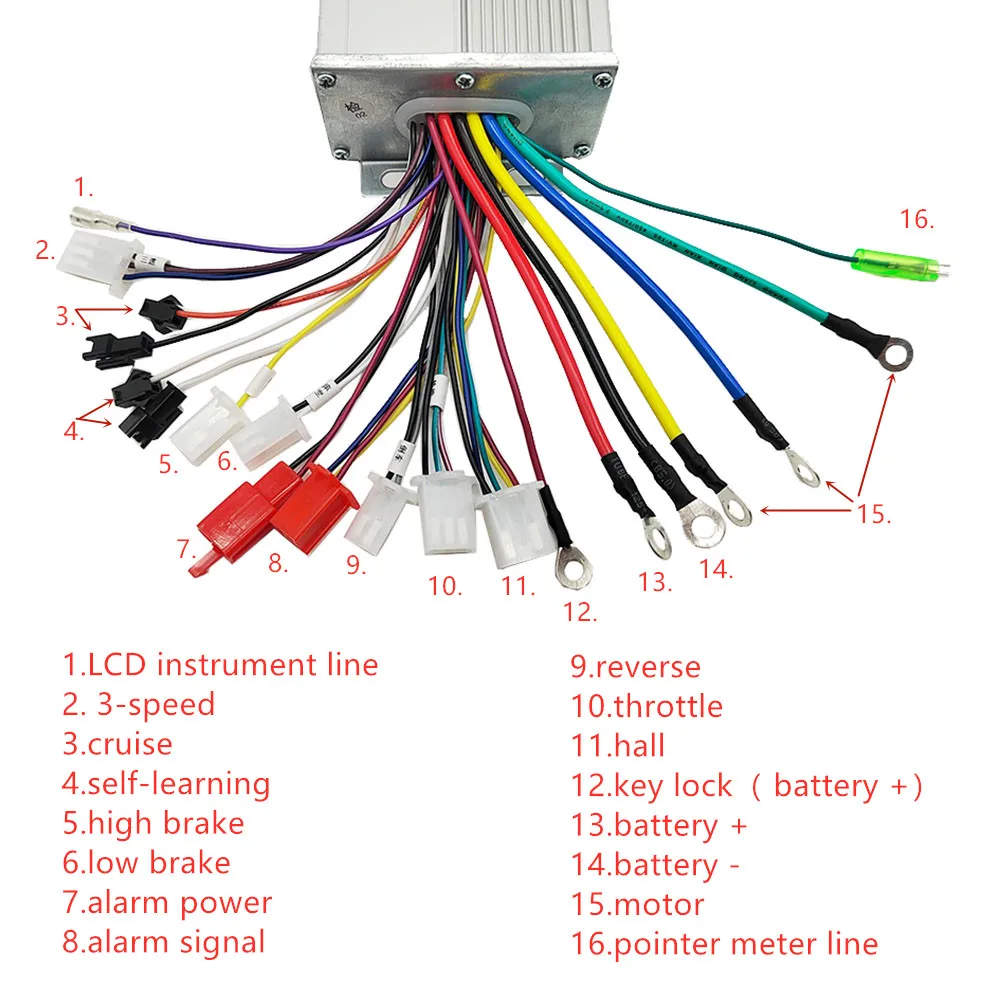
36V-48V 500W controller function:
1.LCD instrument line
2. 3-speed
3.cruise
4.self-learning
5.high brake
6.low brake
7.alarm power
8.alarm signal
9.reverse
10.throttle
11.hall
12.key lock( battery +)
13.battery +
14.battery -
15.motor
16.pointer meter line
how to connect controller?
1.connect the motor line (color to color)
2. connect the battery line(red:battery+ , black:battery-)
3. connect the controller throttle line, key lock(if throttle not have key lock, connect controller key lock to battery+,key lock must connect )
4. connect the hall line(if motor without hall line, don’t need connect)
5.docking the two self-learning lines, the wheel will forward or reverse.
(1.if wheel forward ,Separate the self-learning line.
2.if wheel reverse, Separate the self-learning line. Docking the self-learning line again.if wheel forward ,Separate the self-learning line.)
6.other functions can be connected as needed.




























 배송기간
배송기간